
穿越机重量
小薯片:机身重量36.1电池重量26.6总重62.7 大薯片:机身重量161.0电池重量93.0鹰眼相机18.5总重272.5
穿越机特殊设置之设置图传低功率vtx_low_power_disarm
get vtx_low_power_disarm 查看是否更改成功 set vtx_low_power_disarm = ON set vbat_sag_compensation = 100 set
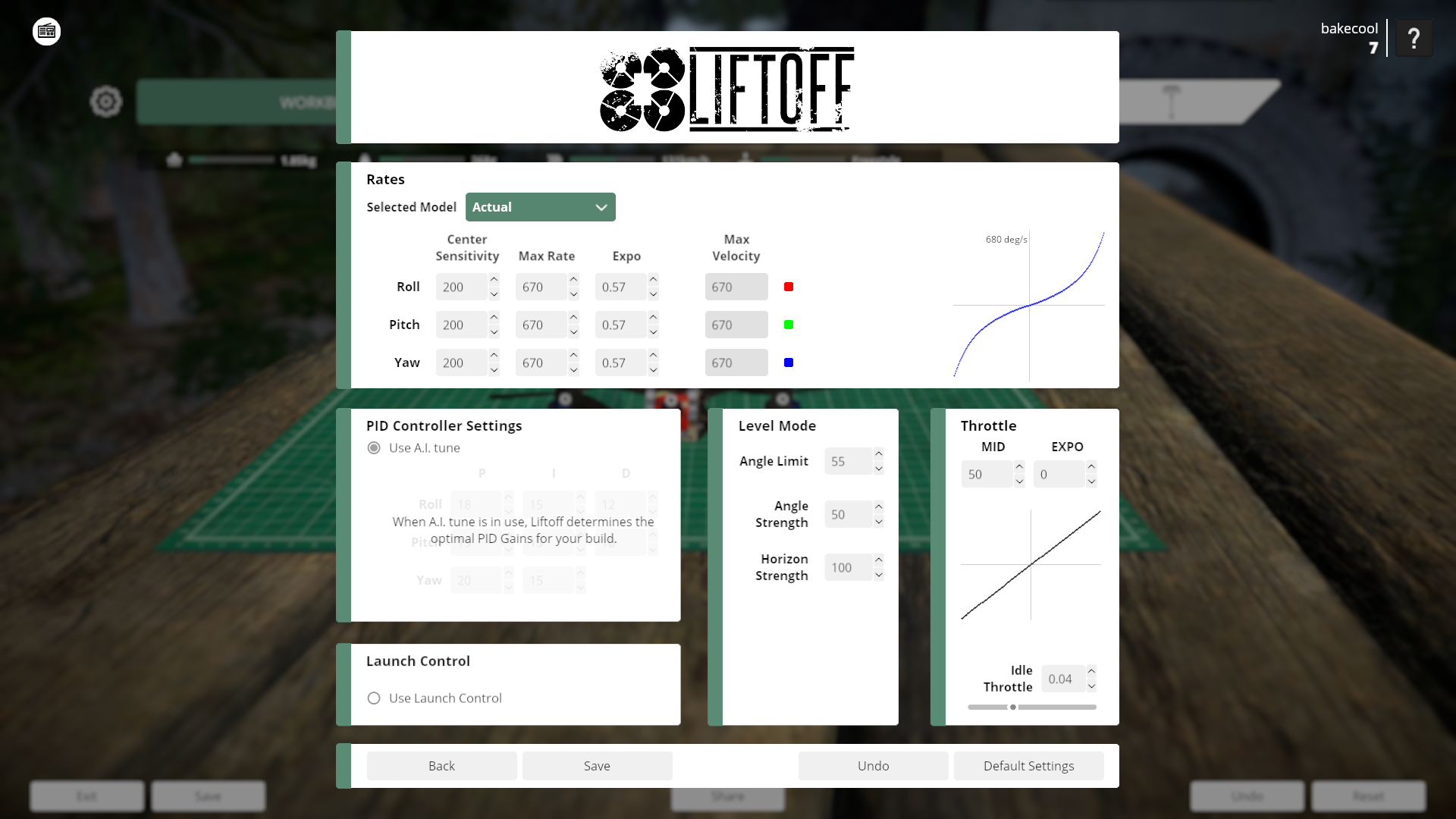
穿越机练习原则与进阶——12——精调PID
pid直达 相关链接:自组5寸调参过程、视频深入讲解穿影x5v2PID调参过程 原标题《AstroRC大薯片CF25,穿越机pid调参过程,PIDtollbox》,转发需附带网址:https://ww
穿越机练习原则与进阶——11——室内自稳
往期内容: 穿越机练习原则与进阶——1——新手选择摄像头角度 穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜 穿越机练习原则与进阶——3——荡秋千、甩尾倒车 穿越机练习原则与进阶——

穿越机练习原则与进阶——10——翻滚、综合能力、学会用屁股坐实、真正的刷锅
往期内容: 穿越机练习原则与进阶——1——新手选择摄像头角度 穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜 穿越机练习原则与进阶——3——荡秋千、甩尾倒车 穿越机练习原则与进阶——
已知Betaflight地面站10.7.2不能支持小薯片的4.3.1完成一些CLI的设置
例如油门限制、按比例限制油门 例如set vbat_sag_compensation = 100 对电压压降进行 "100%"的补偿 那么如何达到解放左手小心翼翼的效果呢? 就是在
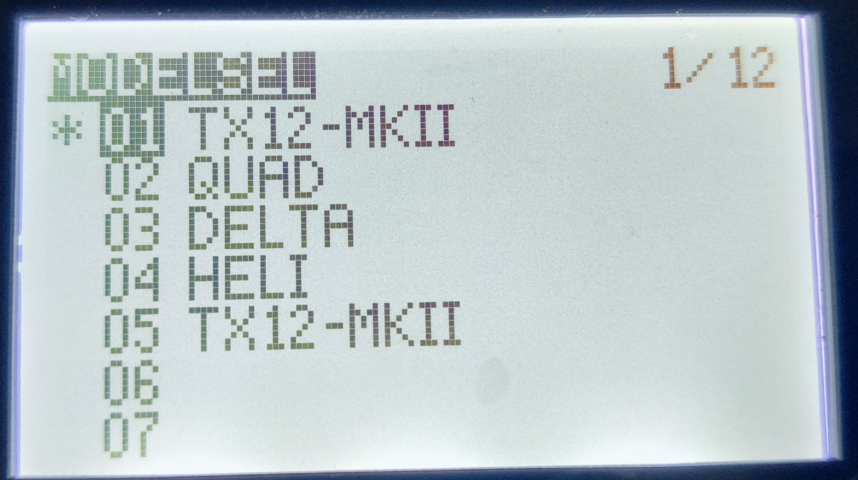
升降舵、副翼、方向舵、油门控制通道的英文简称分别是ELE、AIL、RUD、THR
先保存着。没有对应上横滚(副翼)和俯仰(升降舵) inputs rudder [ˈrʌdə(r)] 为方向舵 偏航 elevator [ˈelɪveɪtə(r)]

穿越机练习原则与进阶——9——弹簧单高跷(兔子跳同手同脚)、用屁股坐进洞里、间歇性刷锅
往期内容: 穿越机练习原则与进阶——1——新手选择摄像头角度 穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜 穿越机练习原则与进阶——3——荡秋千、甩尾倒车 穿越机练习原则与进阶——
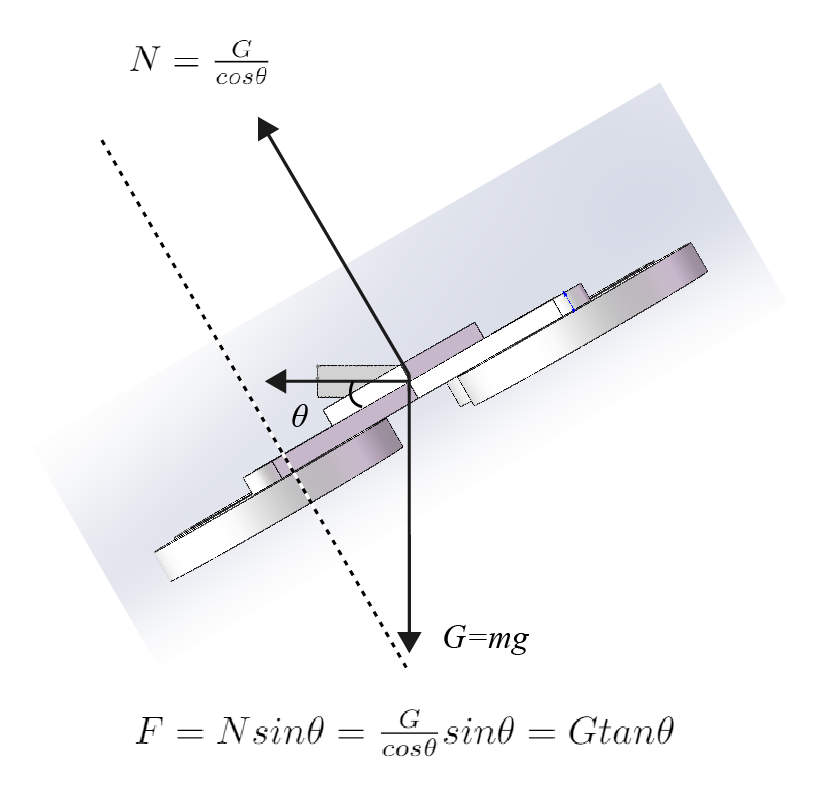
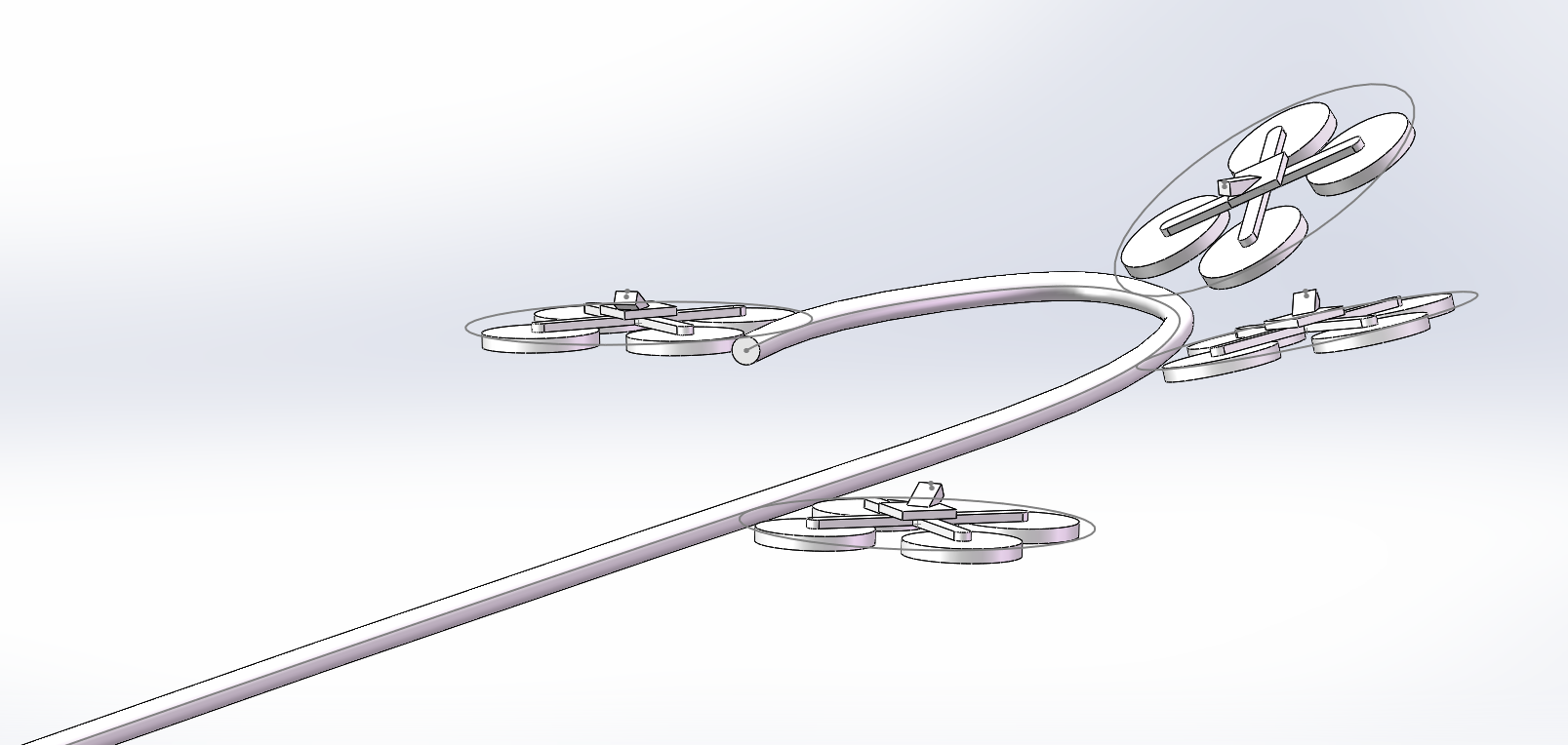
穿越机练习原则与进阶——8——摄像头角度、机身自身重量和油门的50%所确立的角度到底意味着什么——关于超跑
往期内容: 穿越机练习原则与进阶——1——新手选择摄像头角度 穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜 穿越机练习原则与进阶——3——荡秋千、甩尾倒车 穿越机练习原则与进阶——
穿越机练习原则与进阶——7——倒刷锅底层逻辑
往期内容: 穿越机练习原则与进阶——1——新手选择摄像头角度 穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜 穿越机练习原则与进阶——3——荡秋千、甩尾倒车 穿越机练习原则与进阶——
文章搜索
分类
热门文章
Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务