
3D打印文件——摄像头
鹰眼4k拇指相机卡座 火流星 [hide] 火流星 [/hide] [hide] 大薯片 [/hide]
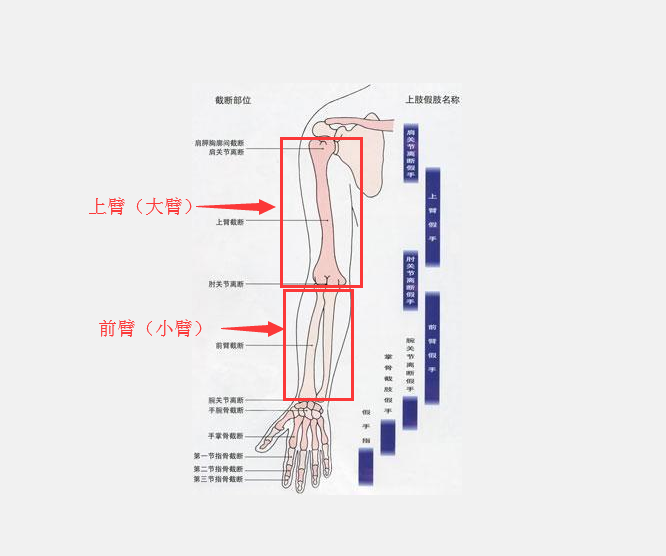
穿越机练习原则与进阶——17——行进中的优先级
调整好姿态,再给油 调整好偏航,再给油 前进和上升是不同的。前进的最大加速度是摄像头水平的时候(动力足够支撑重力时,即推重比支持摄像头的角度的情况下)。上升是不论摄像头角度的悬停即可上升。此时并不是摄
穿越机练习原则与进阶——16——先转头是抬升,后转头是倾倒
往期内容: 穿越机练习原则与进阶——1——新手选择摄像头角度 穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜 穿越机练习原则与进阶——3——荡秋千、甩尾倒车 穿越机练习原则与进阶——
穿越机练习原则与进阶——15——穿越机洗桨的手法避免
飞机下降到自己的乱流里,发生了洗桨。 解决办法:1.俯冲飞行。解决垂直降落。2.弧形转弯。解决原地掉头。 然后就是增大D值、反转电机等硬手段。 往期内容: 穿越机练习原则与进阶——1——新手选择摄像头
模拟器打开顺序
登录liftoff,进入游戏,进入关卡。开机遥控器,选择模式,插入耳机线。将加密狗插入usb
加密狗使用方法
加密狗使用方法:打开liftoff,进入关卡。打开遥控器,插入狗盘。关闭游戏、关闭遥控器、断开狗盘。
穿越机练习原则与进阶——14——停车降落
初学者:自稳降落 进阶:定高上锁 熟练:后仰,减速,滑翔缓慢降落 精英:180度调头,上锁 对于180度调头上锁,建议美国手为左转弯(同理推日本手)。因为左手大拇指的方向,是向右上方45度。最舒适的两
穿越机练习原则与进阶——13——绕中心旋转横滚导致方向偏离多少偏航就修正多少
罗德里格斯公式视频演示:B站直通链接 旋转视例1: 对应的fpv视角: 旋转视例2: 对应的fpv视角: 旋转视例3: 可以看到,想要以摄像头为轴旋转,不配合使用偏航是无法得到收敛效果的。 由旋转视例
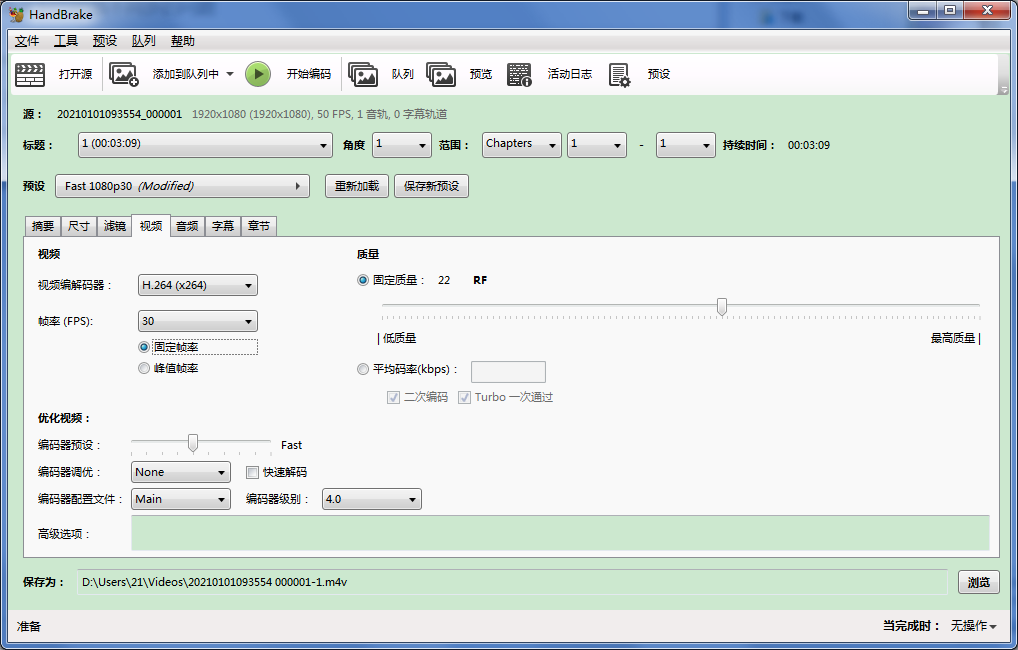
pr处理不同帧率录制的视频不同步的问题
首先将大帧率的视频用固定帧率降到30帧 然后先导入该大帧率视频。再导入不足30帧的视频,没必要把24帧的视频再转换成30帧,因为你会发现依然不同步。 右键点击速度/持续时间 然后用鼠标拖动持续时间,达
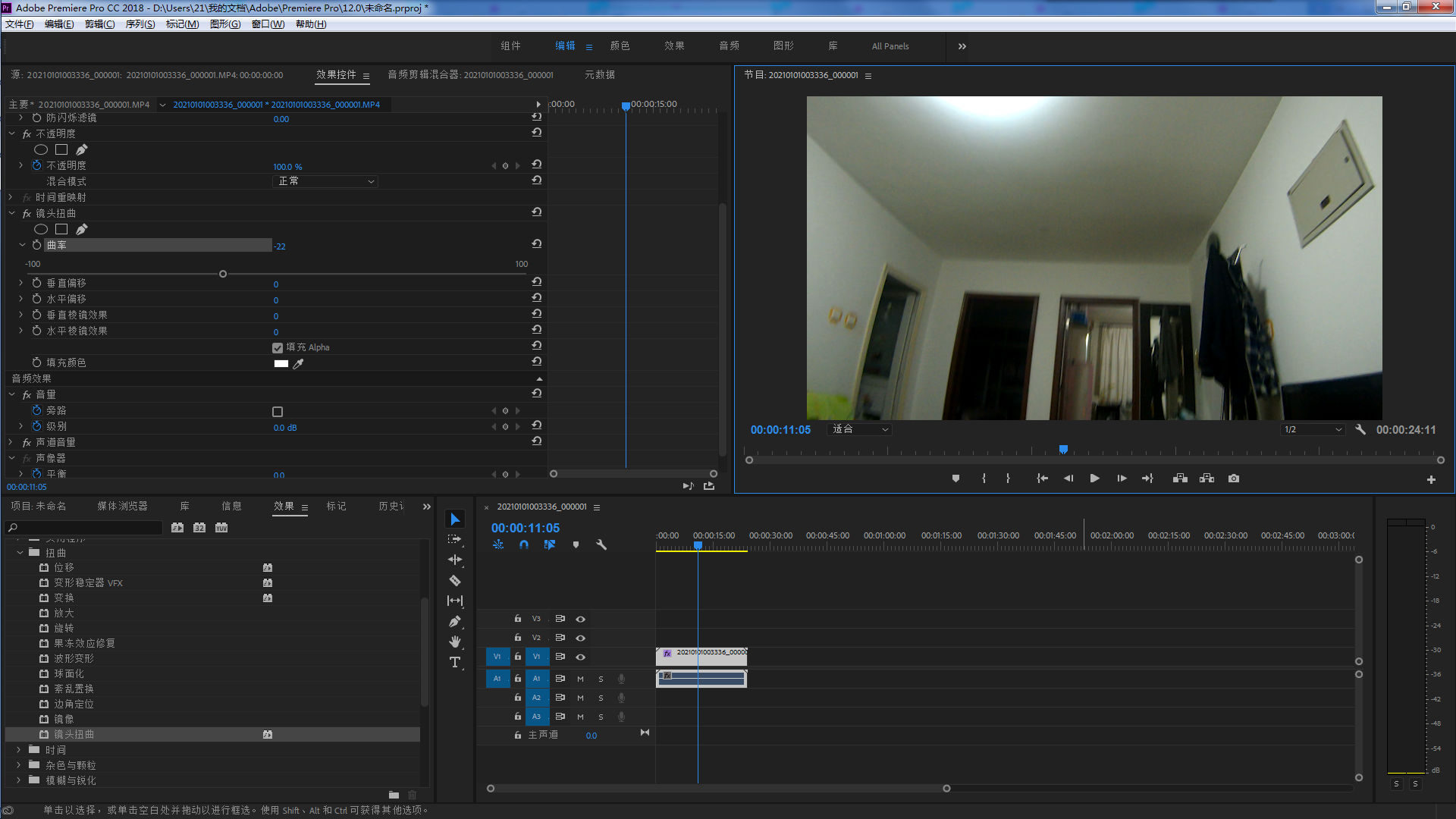
pr治疗镜头畸变
视频效果——》扭曲——》镜头扭曲——》曲率:-22
文章搜索
分类
热门文章
Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务