
edgeTX系统,input mix output都是干什么用的
EdgeTX 把从“你拨动发射机上的摇杆/开关”到“无线电信号飞出天线”的全过程拆成 Input → Mix → Output 三段,这样做既是为了兼容各种机型(固定翼、直升机、穿越机、车、船),也是
edgetx逻辑开关设置edge t1,t2单位是毫秒还是秒
在 EdgeTX 中,逻辑开关(Logical Switch)使用 Edge 函数 时,参数 T1 和 T2 的单位是“秒”。 具体说明如下: T1:表示触发源(V1)需要保持为真的最小时间(单位:秒
betaflight4.3中把一个aux2通道,三段式(a/b/b)拨杆儿设置成a->airmode,把另一个aux2通道三段式通道拨杆儿设置成c->angle.那么打到这三段分别会发生什么
根据你提供的信息,在 Betaflight 4.3 中,如果你将 AUX2 通道 的一个三段式拨杆(a/b/b 模式)设置为: a → AIRMODE c → ANGLE 那么,这个三段拨杆分别打到三
我不用gps,帮我排查有没有需要关闭的地方(kimi)
# # dump # version # Betaflight / STM32F7X2 (S7X2) 4.4.2 Jun 13 2023 / 06:15:58 (23d066d08) MSP A
穿越机倒带的 一个很好的图片解释
用左面的 曲线就很容易倒带,用抛物线就很难,所以 不要试图在闪回点之前是降落姿态,或者由高到低。否则就需要留有角度而不能在侧躺时让穿越机水平。
liftoff活动
Lanterns rise, lanterns glow, Drifting gently in the evening’s flow. Around the world, lantern festi
radio master tx12的设计bug
姿态手(右手)再横滚打到右侧,俯仰从上往下拉,到底的时候总是会向左偏移一下。 以前没有就此问题拆开看,虽然拆了很多遍,但是没有注意到。原来是因为我把弹簧放松(注意往里拧反而是增大弹簧力度),或者说只是
穿越机为什么偏航要晚于横滚
在绕中心旋转时,如果先偏航,再横滚,那么旋转点将定在偏航后的那个点。 先横滚再偏航,那么旋转点会在偏航之前确定。
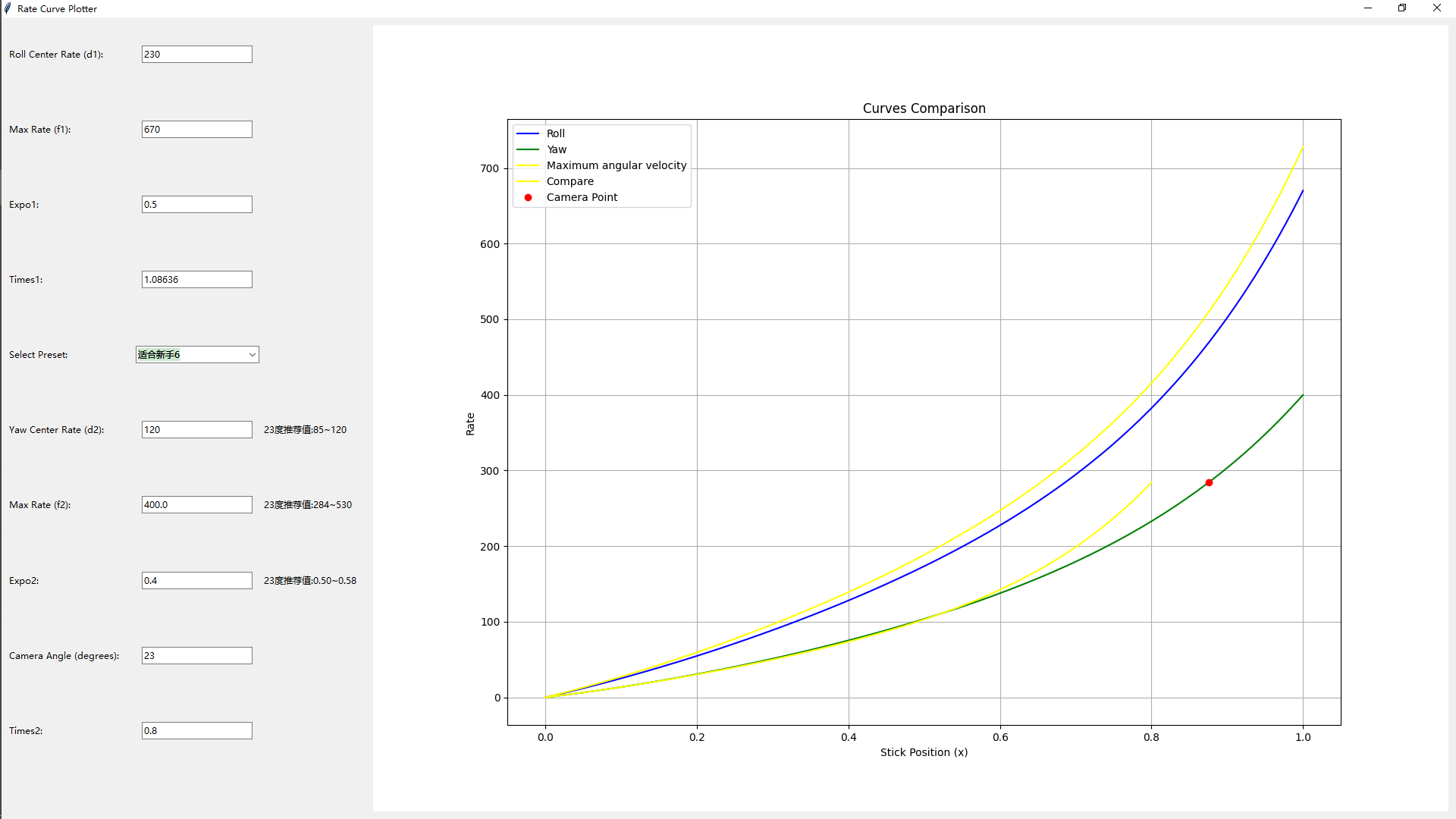
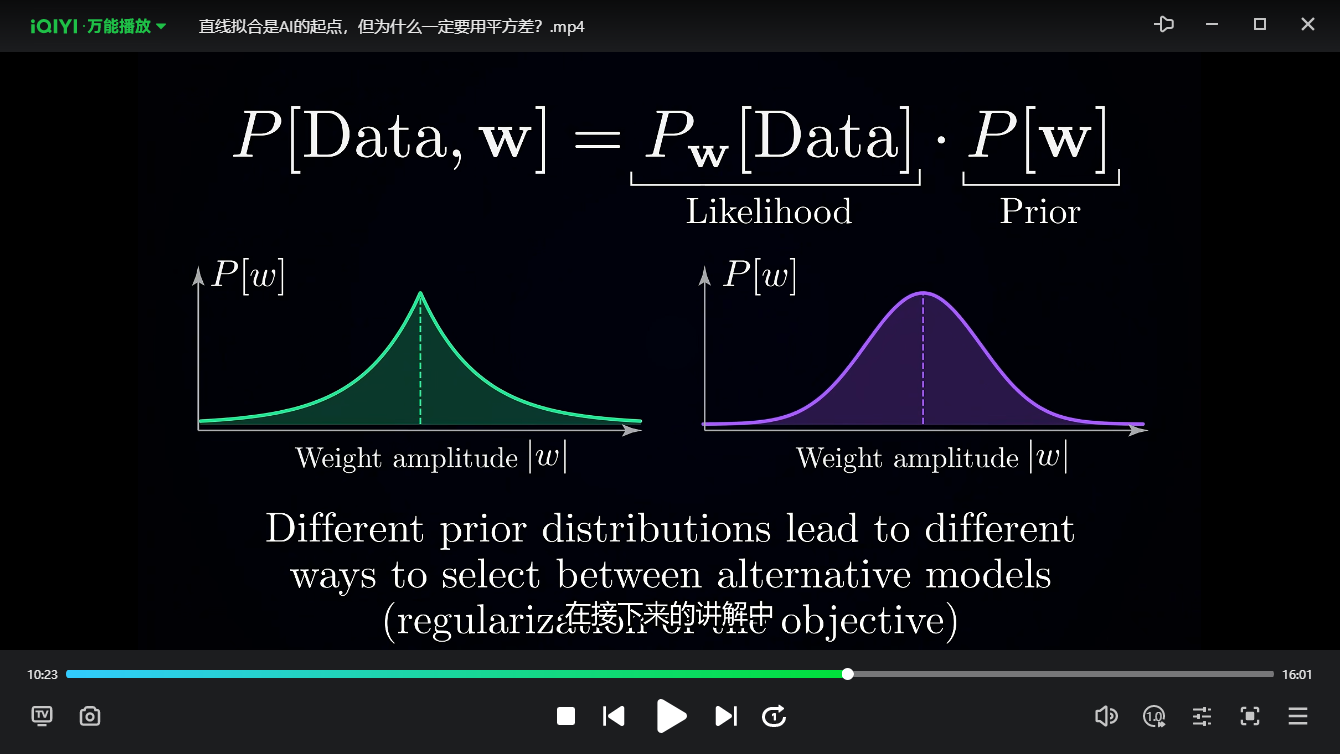
穿越机rate值如何设定——精讲
随着穿越机飞行水平提高,对遥控打杆的杆量愈加精准。对穿越机姿态控制更加游刃有余。我们就需要操控和姿态之间的响应更加灵敏,舍弃那些容错,用来提高对穿越机飞行的快速把控。 一般人类在操控穿越机初期,大脑反
穿越机遥测数据
betaflight接收机页面打开TELEMETRY 遥控器model第12页TELEMETRY discover new sensor 遥控器找到model第9页设置LOGICAL SWITCHES
文章搜索
分类
热门文章
Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务