PID程序测试积分项演示
2530 2022-10-09 21:41 2022-10-11 21:38
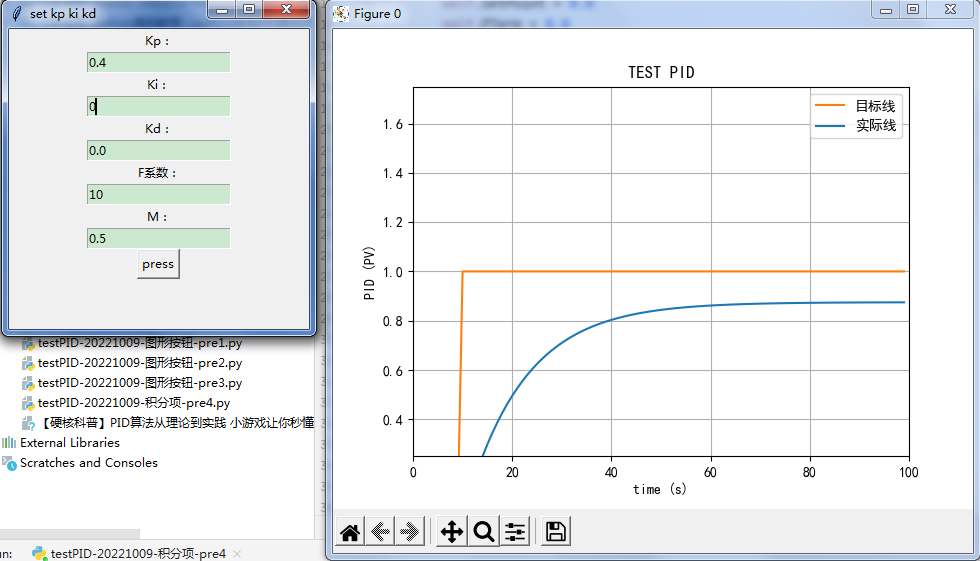
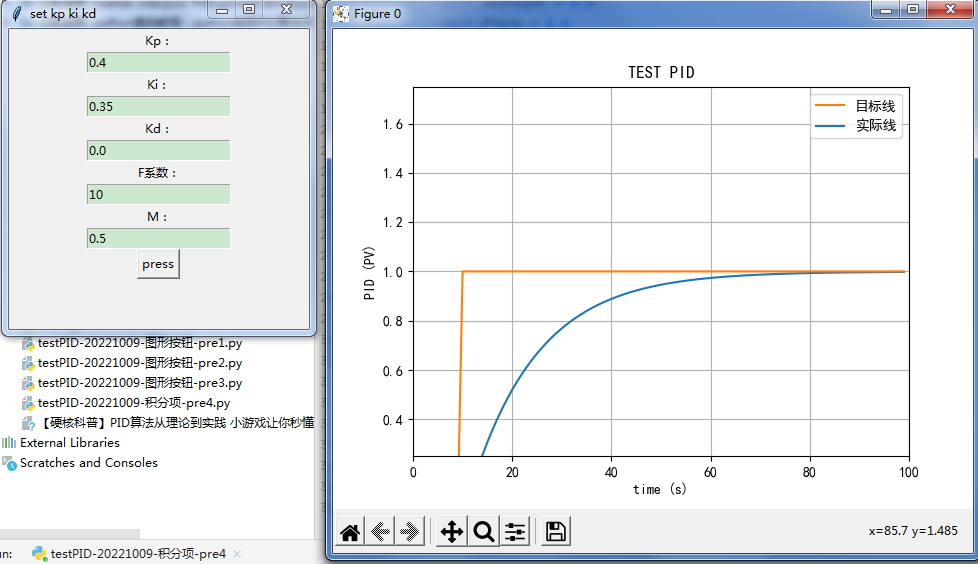
可以看出,随着积分项的引入,稳态误差被消除
对非会员隐藏
尤其是中值不准的时候:
对非会员隐藏
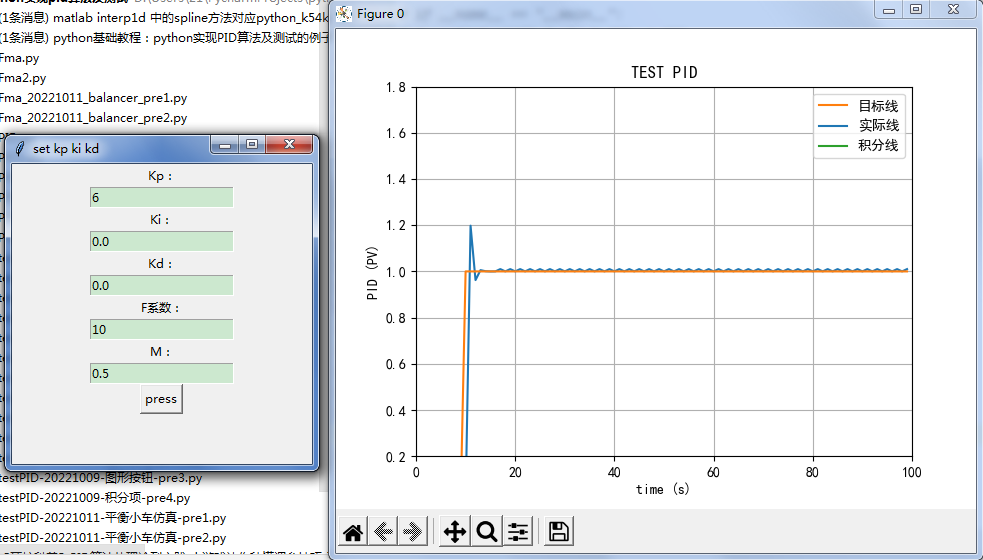
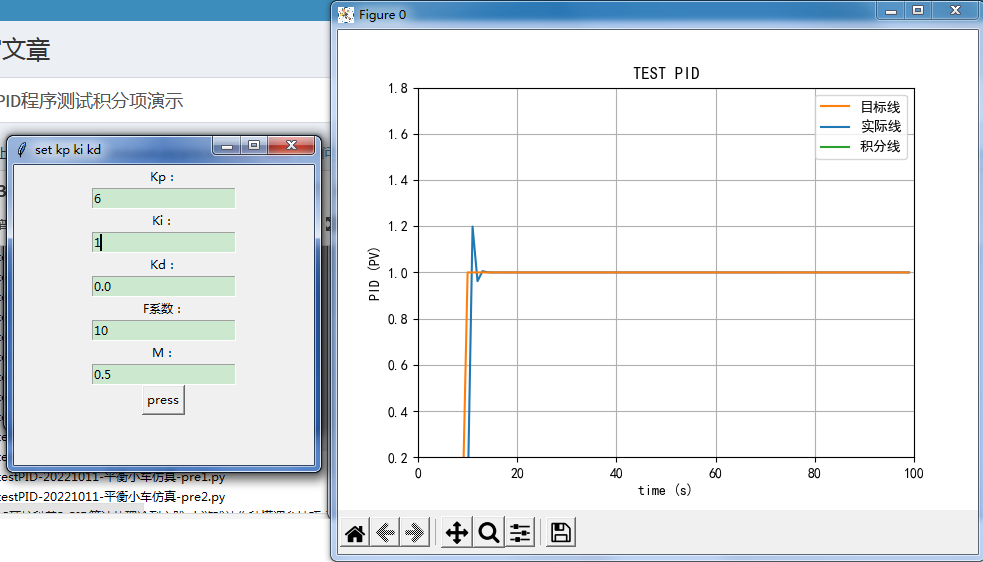
积分饱和现象多产生于控制器长时间无法消除误差,导致积分项向一个方向不断累积,直至达到限幅值;当误差符号反向时,控制器需要先消除已经饱和的积分项,然后才能产生“积极”的正常控制效果;当积分项符号与误差项符号相反时,积分项反而降低了控制器的动态响应性能,使得被控对象出现超调,甚至震荡的现象。
知乎作者:遥远的乌托邦
链接:https://www.zhihu.com/question/59964552/answer/811076708 求助,PID控制中积分饱和是怎么产生的,原理是什么
PID调节过程中:
(1)当比例项过大时会导致控制量在附近波动,即出现振荡;
(2)当振荡出现时可以增大积分项来抑制振荡部分,直至抑制到没有振荡现象,但随着积分项增大,过度抑制会导致低频共振,所以这个时候就需要微分项来抑制低频共振;
(3)当微分项过大会放大噪声(微分项会使伯德图中的对数曲线向上翘这就会放大高频声),微分项降低比例项产生的超调比较容易,降低积分项产生的超调很困难,而降低积分项产生的超调通常通过降低比例项来消除,但若降低比例项系统的响应就会变慢,精度也有所降低,所以积分项在不过分苛求稳态误差的情况下可以调为零。
链接:https://zhuanlan.zhihu.com/p/518993950 PID超参数调节心得
知乎作者:王复来
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论