穿越机rate值如何设定——精讲
3070 2025-05-08 11:13 2026-01-26 15:10
随着穿越机飞行水平提高,对遥控打杆的杆量愈加精准。对穿越机姿态控制更加游刃有余。我们就需要操控和姿态之间的响应更加灵敏,舍弃那些容错,用来提高对穿越机飞行的快速把控。
一般人类在操控穿越机初期,大脑反应速度会较慢,精神高度集中在当下。少数人还会回味过往的炸机过程造成胆小紧张。只有熟悉了各种炸机套路。失速路线,失重状态下判断哪里是天空哪里是地面。自己处在抛物线的哪个阶段。到利用自己的姿态和弧线,如何翻身上马重拾操控权。
这样一个过程,要求每个人根据自己的熟练程度、响应速度来调整毫秒级别内杆量的变化与机身惯性、转动惯量之间的关系。那么就必须找到自己飞行的类别以及对应的rate
pid保证了我们打完杆量之后飞机对命令的响应过程。
rate保证了我们人脑反应效率执行调整杆量命令,到遥控器上体现出的各种手抖、误差。
当你操作可以指哪儿打哪儿的时候,也就是你rate值开始调高的时候,调高的主要是Actual模式下,roll的中央灵敏度、roll的expo,调低的是yaw的中央灵敏度、偏航的Expo指数参数(Exponential)一种指数曲线映射功能。不变的是最大角速度。
下面分两大类飞行来指导如何找到自己的rate参数
一、flow花飞
特点:旋转(包括滚转(包括纯横滚、以摄像头中心旋转)、绕树旋转、绕头顶目标旋转(大回环)、绕地面目标旋转(朱克翻滚))
精髓:横滚角速度大于偏航角速度
方案调试步骤:
- 原理:
- 调试过程:
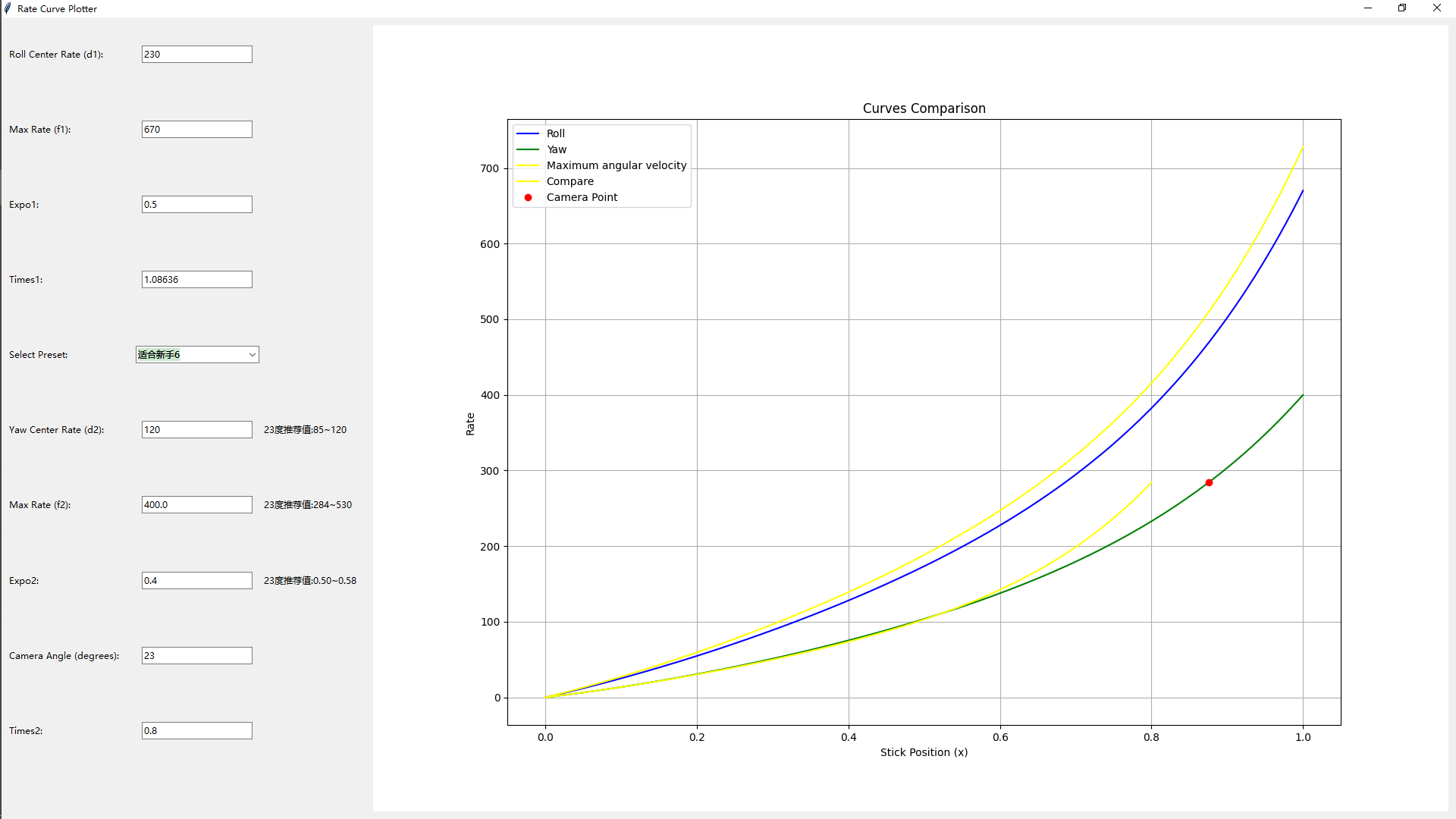
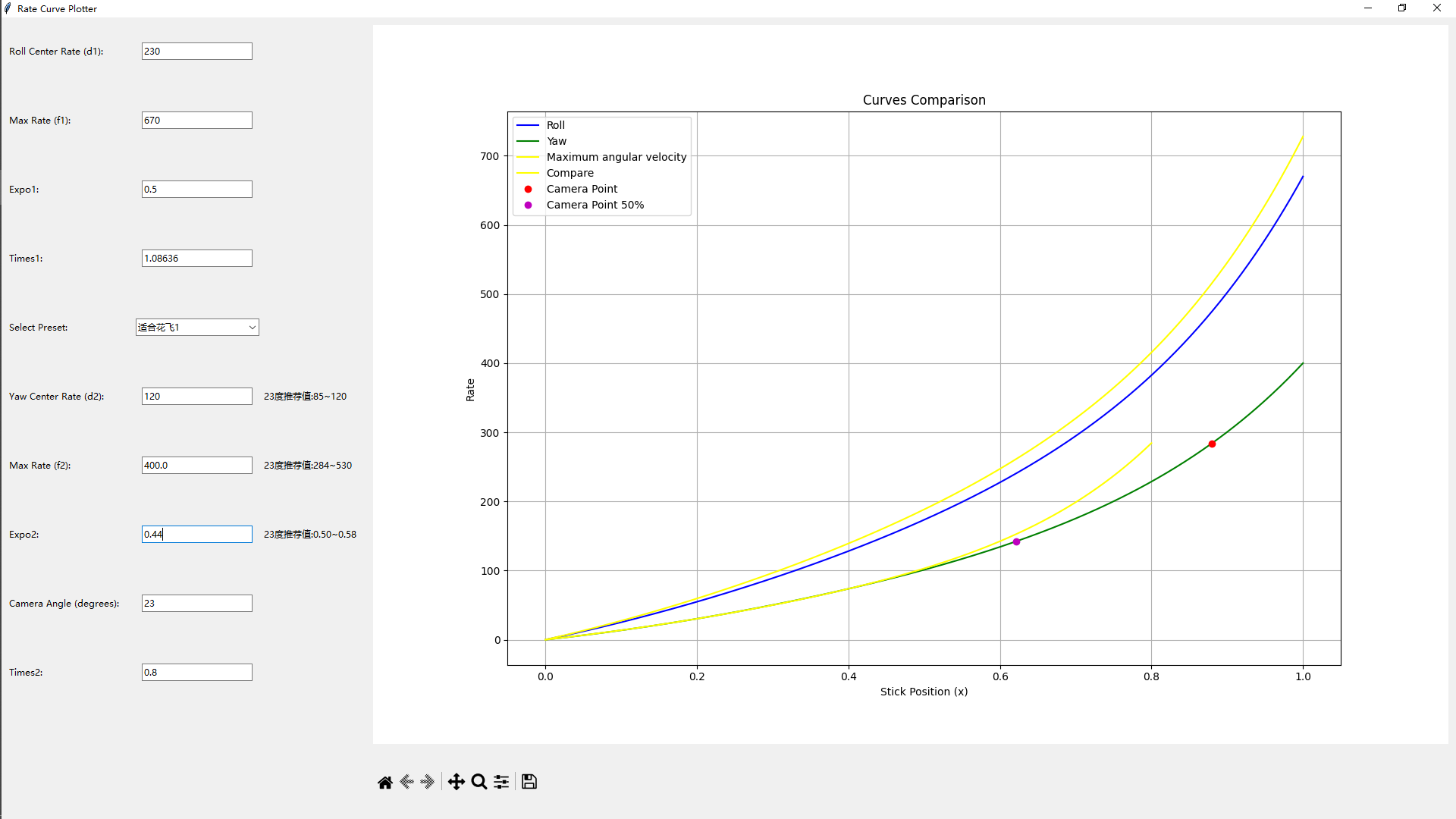
- 打开调试软件,输入自己想要提高的roll以及pitch的两个参数,中央灵敏度由原来的200->230,目的是朱克翻滚时提高对障碍物(旋转点)的跟踪能力。expo值的减少意味着曲线更线性,同时也对中央灵敏度有提高的作用。0.57->0.50,将极值角速度与80%以内的杆儿量,更加匀称。
- 对应yaw两个参数,中央灵敏度->120,expo->0.4. 之所以选择120, 400而不是110,500,是为了在已经很低灵敏度的偏航下,尽力提高偏航的响应。而限制最大角速度是为了配合横滚完成绕屏幕中心旋转的花飞动作,框定、限位绕屏幕中央旋转的旋转点上下位置。这里不限制在23度摄像头角度标准的284.398最大角速度的原因是我们采用上下旋转点限位的策略,将最高旋转点限制在 397,将最低旋转点控制在二八法则下。因为偏航中央灵敏度已经很低,且与最大角速度的落差已经不大,移动过程中的累计效果不明显,因此建议expo可以调小,让整个曲线更加线形一些,方便在roll非极值条件下的后半段,找到容易的yaw来配合,这时候就可以体现最低旋转点的落点范围,同时又在前半段更加贴合曲线。这里我喜欢把黄绿线交点放在在0.5的区间。
- 最大整合角速度由原来的670->700+(注意因为betaflight只截取到十位数,所以个位数设置无效,精确最大角速度在23度摄像头角度下应该是727.8614528615484,我们将放大倍率定为cos值的1.0863603774052961)
- 调整后观察曲线可以发现:
- 偏航比例在摇杆儿80%范围内配合较为完美,剩余20%,留给偏航极限救机不用配合横滚
- 横滚曲线较默认提高了线性感。同时保留了expo的陡峭,有利于狭窄空间内飞手快速碎杆调整跻身姿态,稳定钻洞
- 在做半马翻滚、朱克翻滚、各种滚转时,增强了偏航的包容度,让偏航延迟于横滚,不易造成偏航带来的旋转点偏离
这里介绍我自己的过程:
1.我需要中央灵敏度更灵敏,因为我旋转已经可以精准控制,需要俯仰可以快速跟踪目标,所以roll的Center Rate同俯仰一起由200提高到230.
2.我需要借助最大角速度极值点均摊一些到60~80段位,所以roll的expo由0.57减小到0.55.注意,当times2为1的时候,调试roll和yaw的expo会是相等的。保持曲线在同样的位置(50%或者55%)进行明显的弯曲。
3.在按比例绕屏幕中心旋转算法计算下,我将最高点限位设置到最大角速度400(推荐值是397,而betaflight软件只认两位有效数字),根据670-400=270比400-284=116的比例,调整yaw的中央灵敏度为140,expo为0.4
4.将times2设置为0.8,贴合前半段,修正中央灵敏度为120,为了照顾前80%的曲线,修正expo为0.5(向前半段靠拢).后来改为0.85,是为了让expo的参数大于0.57.原因是在横滚和偏航都没有打到底的时候,曲线更加贴合。后来改为0.85,并且让expo在0.45,然后调整center为120,这样目的是为了更加线性。因为强化的是横棍的快速打到位,而偏航小剂量跟随,避免偏航打到后期有陡增的烦恼,所以随机随便一个线性的偏航,就可以满足快速横滚。
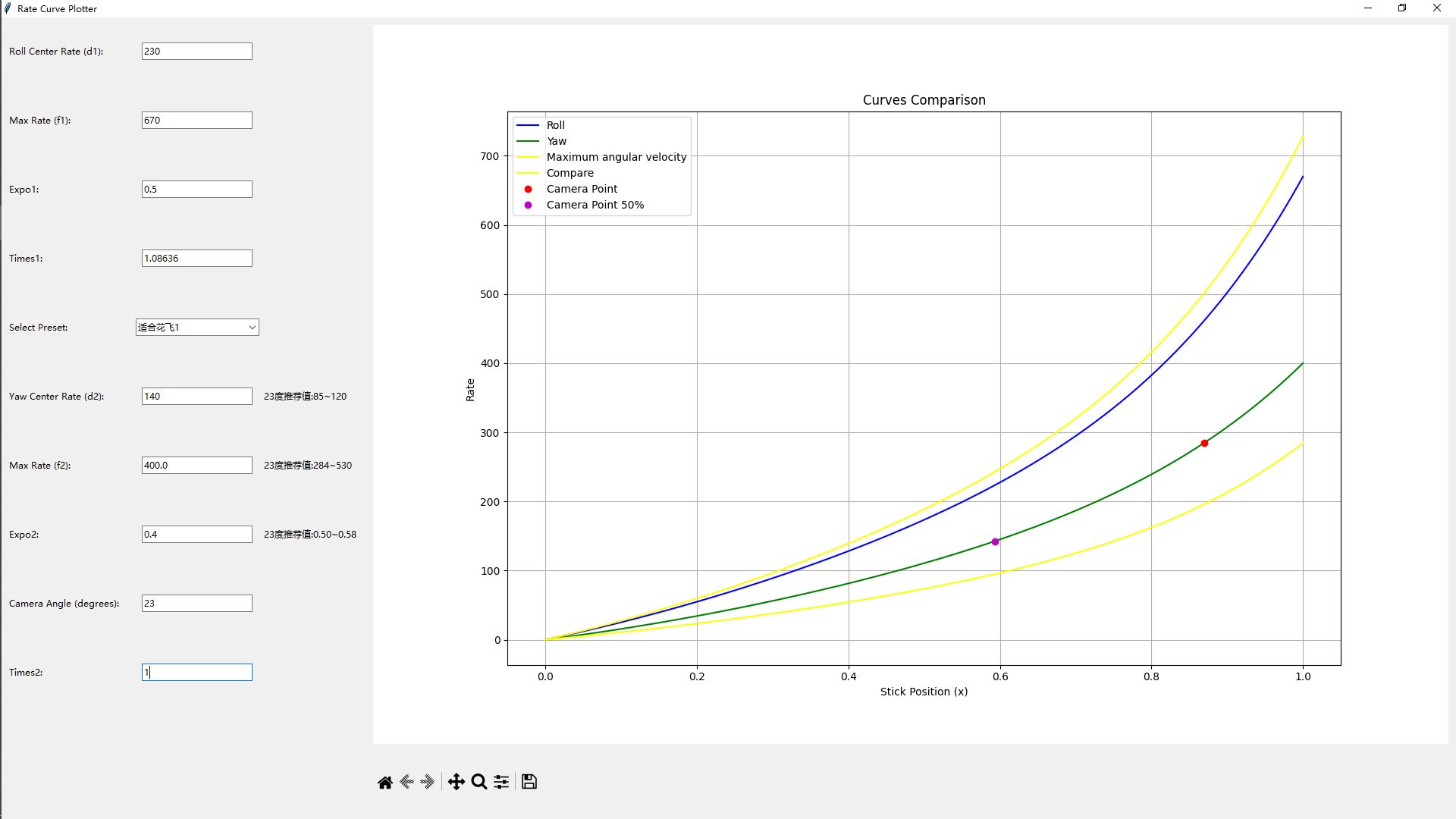
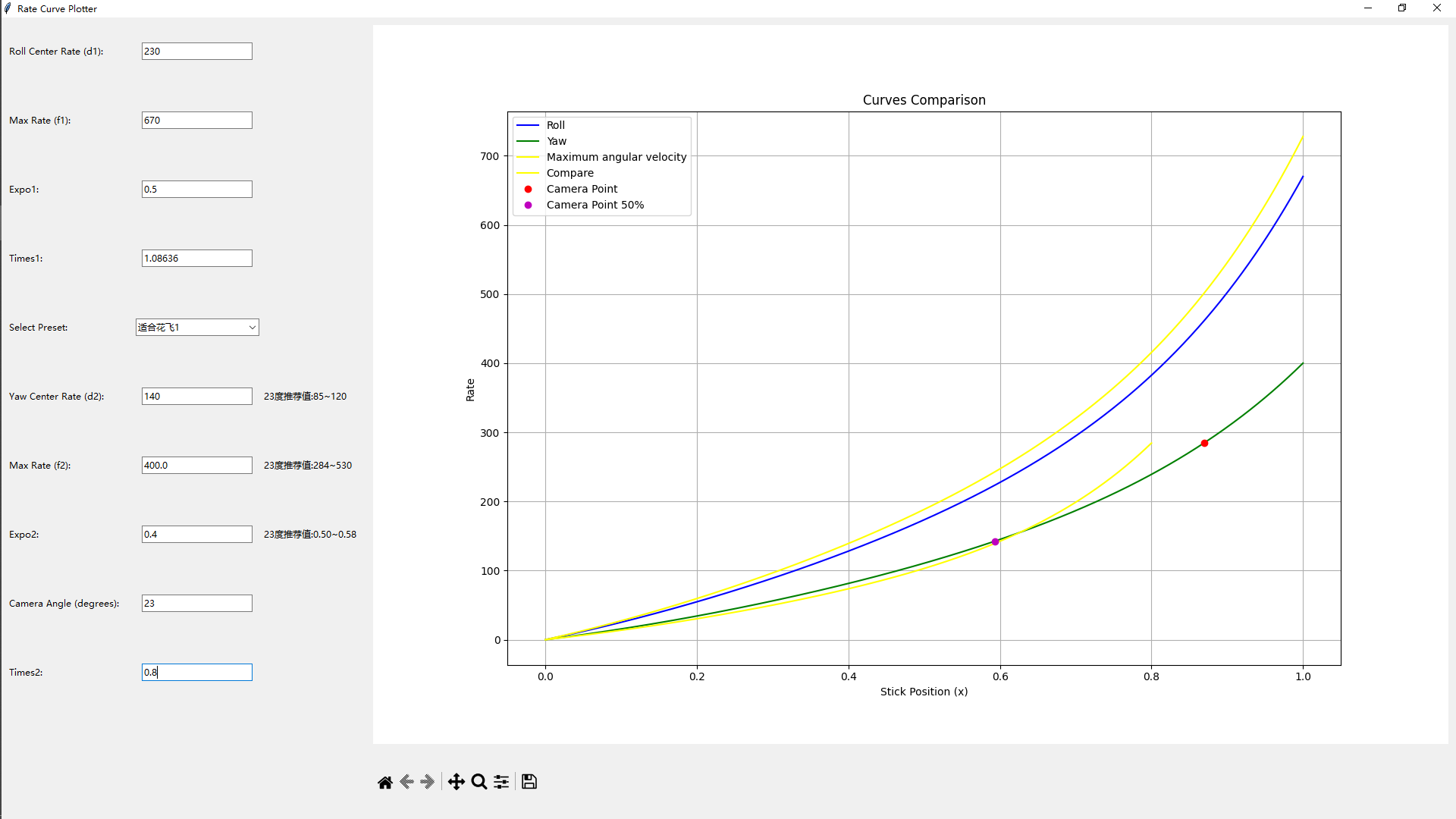
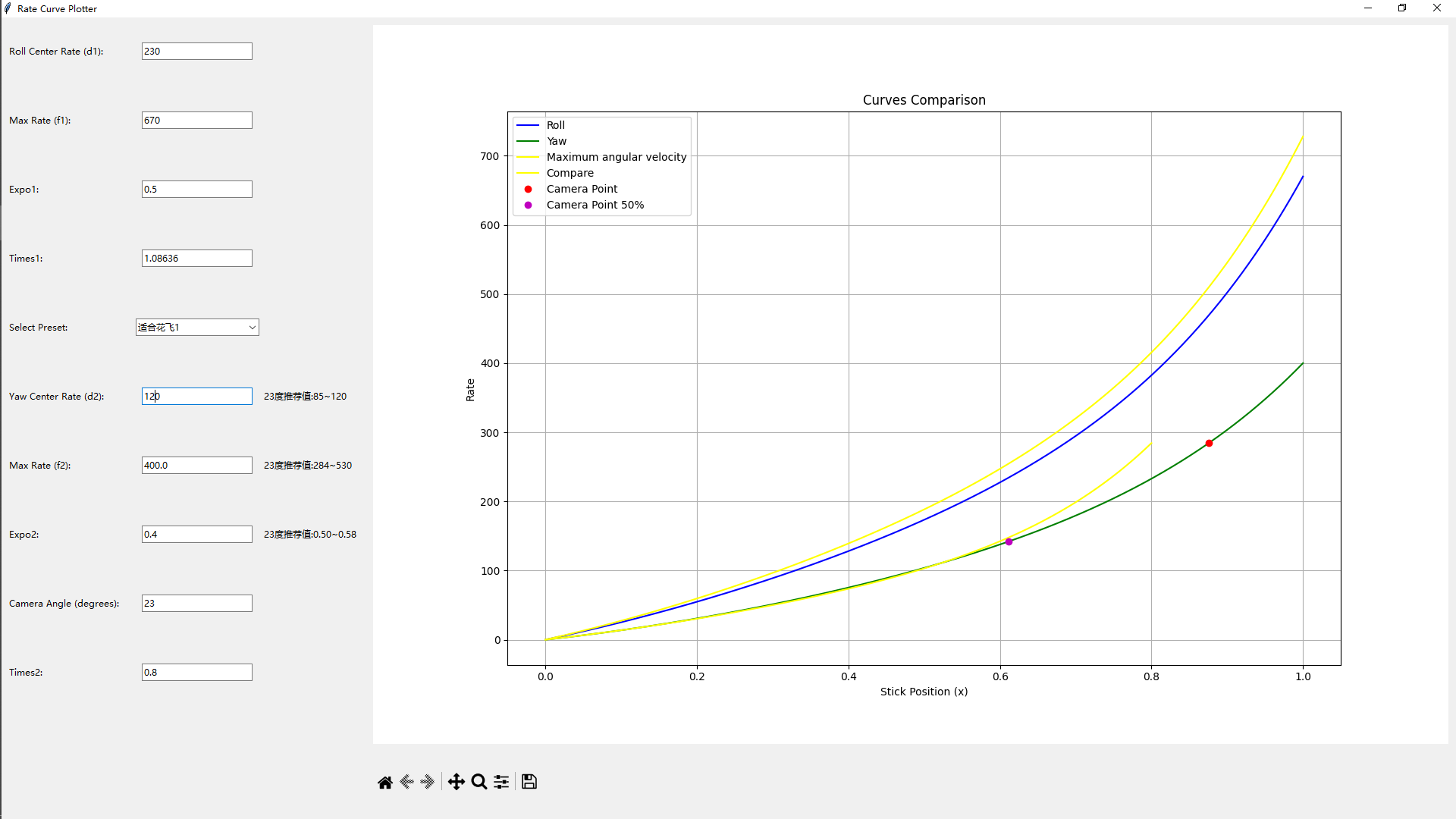
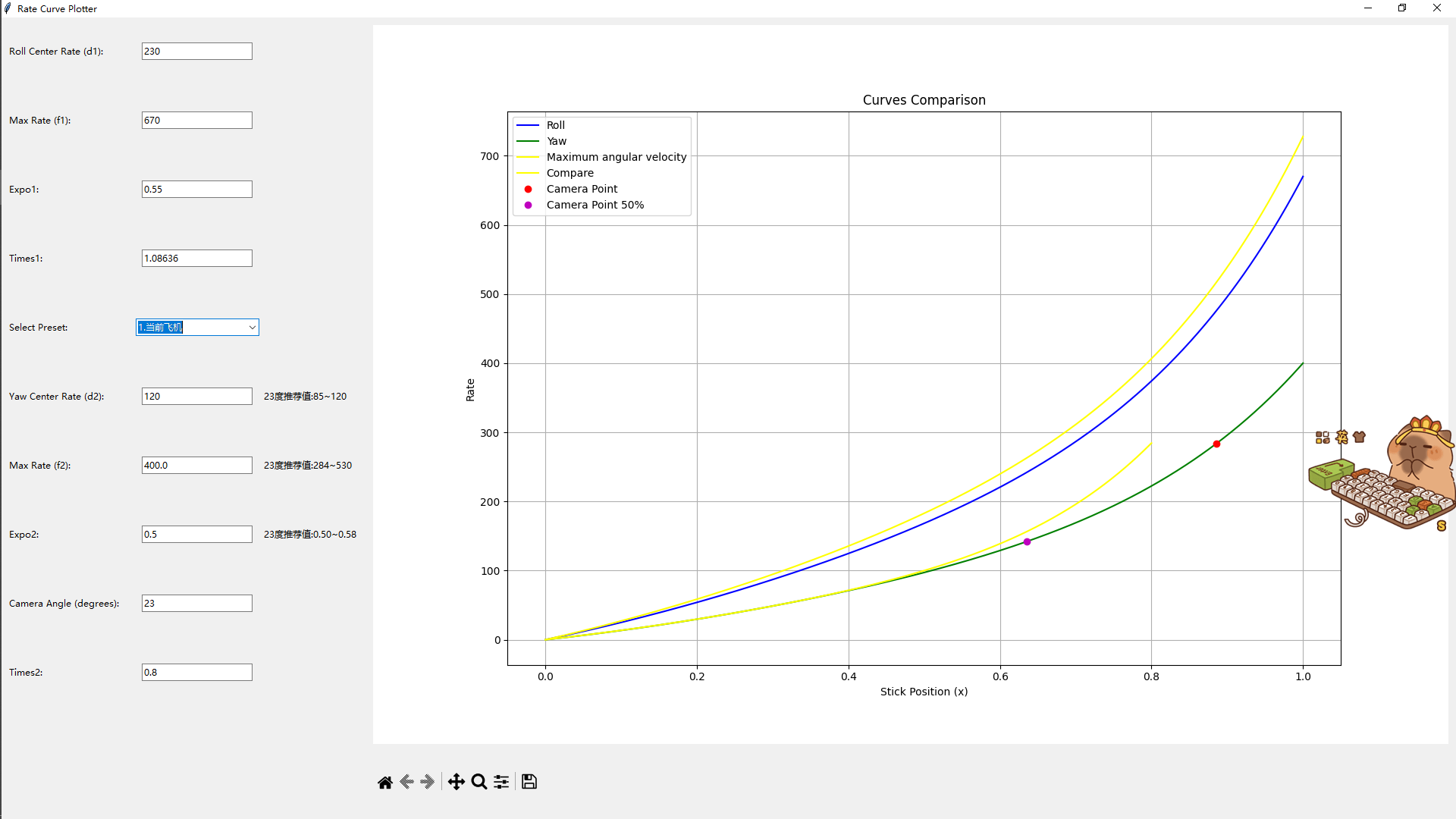
5.请注意,绿线在前半段一定不要高于黄线,即使让旋转点偏靠屏幕下方,也不要让旋转点永远找不到。别扭永存和容忍区间还是有本质区别的。为了yaw的1120,我竟然抬高roll从220到230.就是这个原因。
expo主要在中段(0.5~0.6),如果曲线形状不好,要靠调整中央灵敏度和最大角速度来解决,而不是调整expo.
为什么要求黄线和绿线在前半段贴合,当旋转有快慢刀的变化时,回弹到尾声。那种缓慢地归位感会让你很享受旋转。
二、sbang花飞、竞速
特点:卡点儿、不管一切的转弯,都能转换成的绕左或绕右旋转(包括破s也可转换成侧手翻)
精髓:根据绕点需要找到偏航与横滚杆量一致
方案调试步骤:
1.原理
to be continued...
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论